
Filter by
Real-Time Fish Detection Approach on Self-Built Dataset Based on YOLOv3
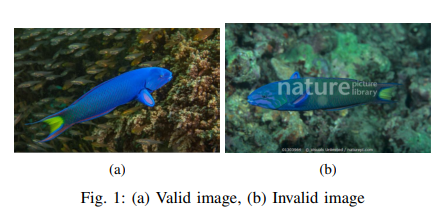
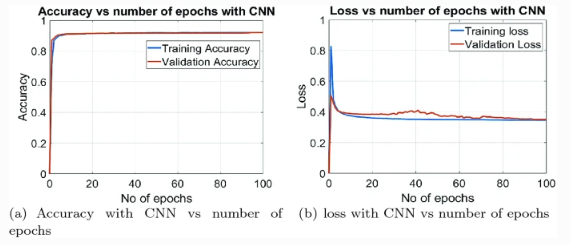
Creating a model to detect freely moving fish underwater in real-time is a challenging process for two main reasons. First, the available datasets suffer from some limitations that severely affect the results of the detection models operating in challenging and blurry environments. These models should be able to capture all of the fish movement given different types of surroundings. Second
5G and Satellite Network Convergence: Survey for Opportunities, Challenges and Enabler Technologies
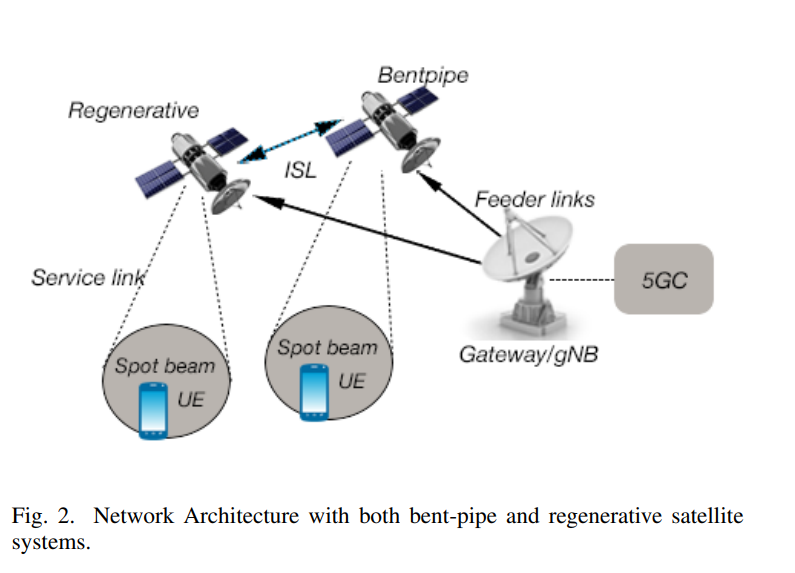
Development of 5G system as a global telecommunication infrastructure is accelerating to realize the concept of a unified network infrastructure incorporating all access technologies. The potential of Low Earth Orbit (LEO) constellation systems has emerged to support wide range of services. This could help to achieve 5G key service requirements for enhanced Mobile Broadband (eMBB), Massive Machine
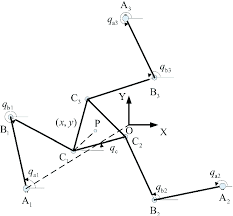
Modeling of Nonlinear 3-RRR Planar Parallel Manipulator: Kinematics and Dynamics Experimental Analysis
Parallel Manipulators (PMs) are gaining increasing importance, due to their superiority over serial manipulators in industry in terms of smaller workspace (WS), speed and precision. In this paper, the design, workspace analysis, modeling and control of a novel 3-RRR Planar Parallel Manipulator (PPM) are proposed. Because the kinematic constraint equations are complex due to the nonlinear behavior
Dynamic Programming Applications: A Suvrvey
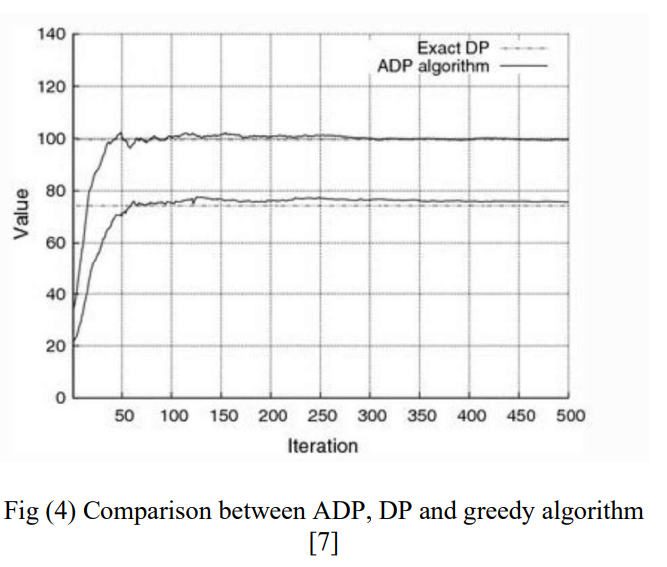
Dynamic programming is a mathematical optimization first invented in 1950s and lived till our times to make optimizations and reduce complexity in several different fields like bioinformatics, Electric vehicles, energy consumption, medical field and much more as a proof of being a powerful technique. In this paper, the various fields and aspects in which Dynamic programming has a significant
Solving Inverse Kinematics of a 7-DOF Manipulator Using Convolutional Neural Network
This paper presents a way to solve inverse kinematics of a 7-DOF manipulator using artificial neural networks. The manipulator consists of a 6-DOF articulated arm installed on a linear guide system to increase the workspace of the robot. The purpose of this paper is to provide an alternative to the traditional and complicated way to solve inverse kinematics by using artificial neural networks. The
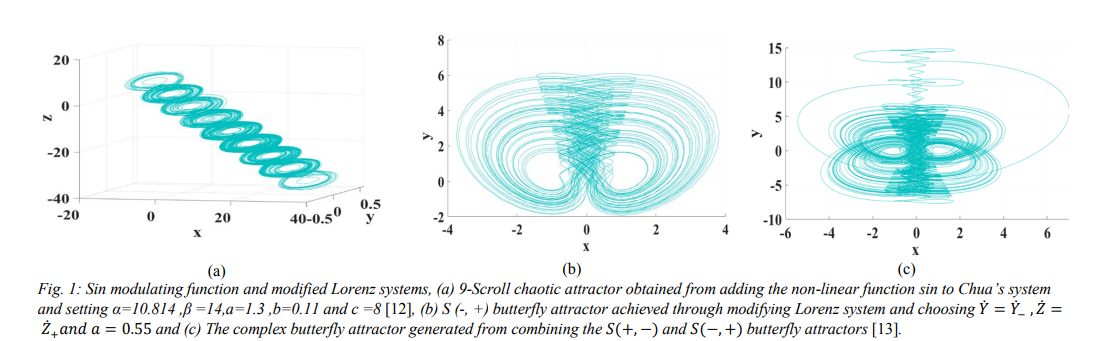
Generalized Formula for Generating N-Scroll Chaotic Attractors
The generation of Multi-scroll chaotic attractors and chaos theory has gained much attention due to its many usages in a wide range of applications such as image-encryption and random number generators. There have been many previous attempts to establish a system that is able to generate large numbers of n - scroll chaotic attractors by modifying existing systems such as Lorenz and Chua's systems
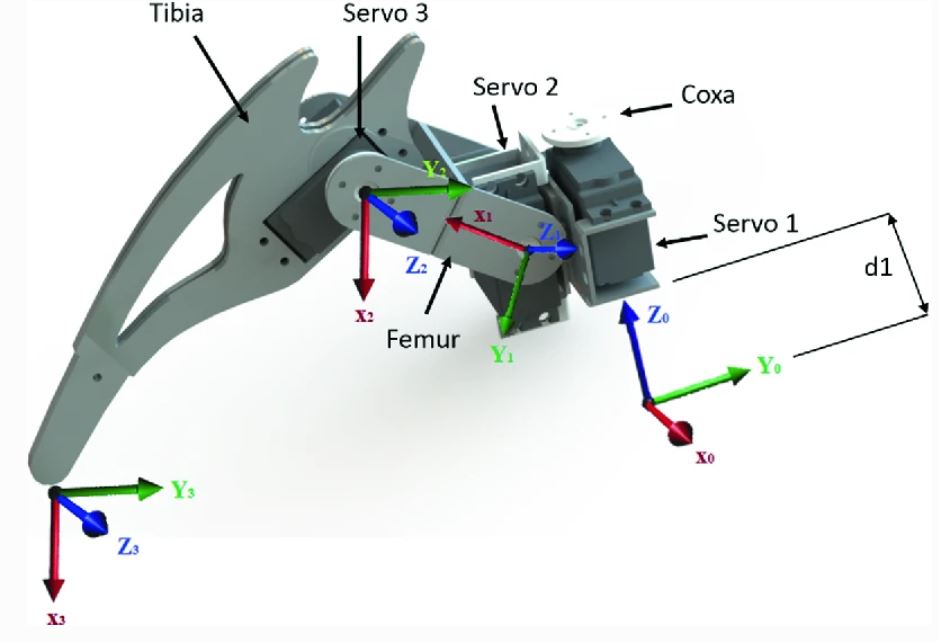
Experimental Modeling of Hexapod Robot Using Artificial Intelligence
Hexapod Robots gave us the opportunity to study walking robots without facing problems such as stability and expensive custom made hardware. It has a great deal of flexibility in moving over different terrains even if some legs become malfunctioned or facing some difficulties in movement. In this study the kinematic analysis of CH3-R 18DOF Hexapod Robot is discussed where each leg contains three
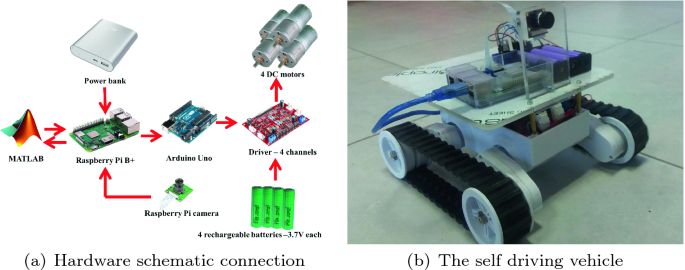
Path Planning of a Self Driving Vehicle Using Artificial Intelligence Techniques and Machine Vision
This paper aims to implement an efficient model of the most optimum path to follow an object on a Self Driving Vehicle (SDV). The path of the vehicle is predicted by using Machine Vision (MV) and Neural networks (NN) model. The NN model uses numerous amounts of training data. First the system works by using the MV algorithms to detect objects with predefined colors. Then, the location of the
Deep Learning Based Kinematic Modeling of 3-RRR Parallel Manipulator
This paper presents a novel low cost design for a 3-RRR Planar Parallel Manipulator (PPM). These manipulators proved their superiority over serial manipulators due to their speed, precision and smaller work space where the work space area is accounted for in the design to ensure that the robot is performing its task in a smooth and simple way without getting into any singularity points. The
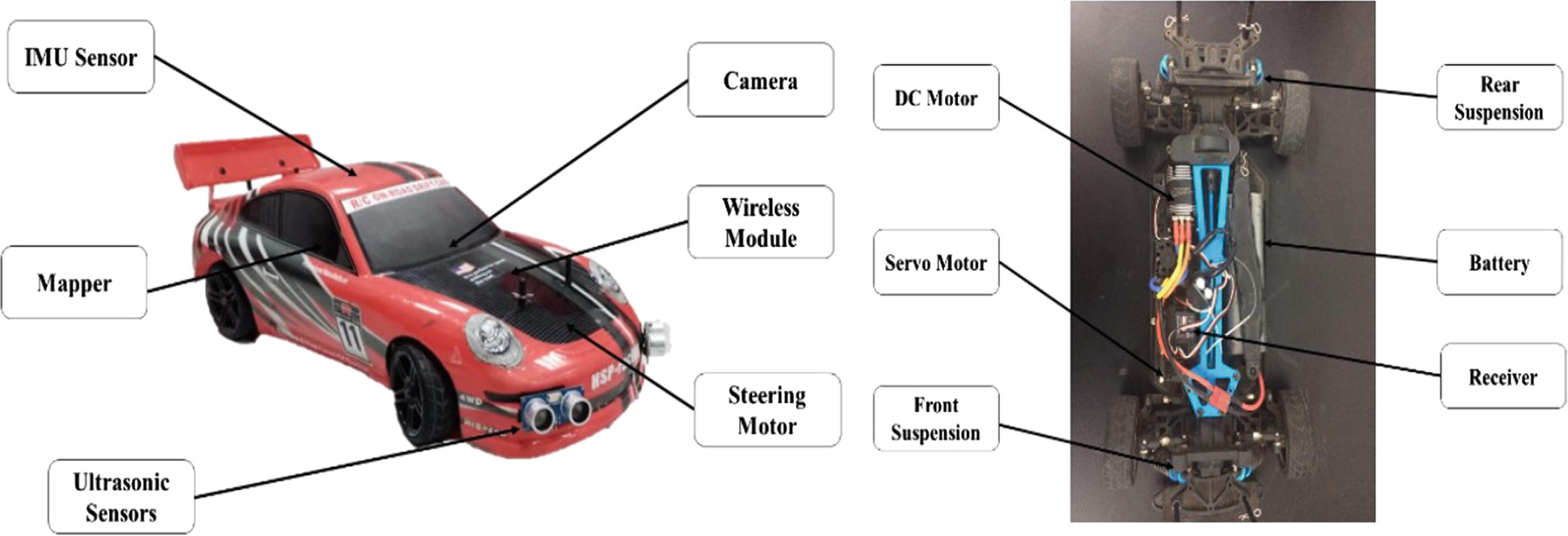
A Hybrid Deep Learning Based Autonomous Vehicle Navigation and Obstacles Avoidance
Technological revolution has reached all life activities starting from day planning reaching communication, entertainment, industry, and transportation. Each of previously mentioned categories get improved in a way making human life easier and safer. In the use of automatic control, several researches focused on automating vehicles’ systems to make driving easier and safer. The availability of