
Filter by
Analysis of musculoskeletal disorders in personal care industries in Egypt
The increase in the complexity of operations in personal care industries in Egypt forced the ergonomic experts to propose various tools to analyze the human errors and eliminate the most dangerous operations according to the international standards of safety and ergonomics. International references such as the Rapid Upper Limb Assessment (RULA) and Rapid Entire Body Assessment (REBA) analysis are

Neuro-fuzzy system for 3-dof parallel robot manipulator
Planar Parallel manipulators (PPMs) are widely used these days, as they have many advantages compared to their serial counterparts. However, their inverse and direct kinematics are hard to obtain, due to the complexity of the manipulators' behavior. Therefore, this paper provides a comparative analysis for two methods that were used to obtain the inverse kinematics of a 3-RRR manipulator. Instead
Two-wheeled Self balancing robot Modeling and Control using Artificial Neural Networks (ANN)
This paper is focusing on the problem of the Self balancing robot which has many potentials due to its power consumption and maneuverability advantages. Modelling and controlling of the two-wheeled self-balancing robot is presented. For modelling part, two models were used in compare with a real proposed robot. At first, mathematical model was driven and the state space was achieved to model the
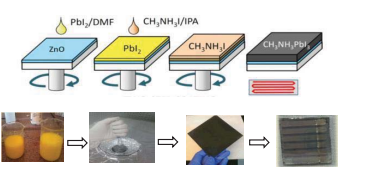
Interfacial modification of perovskite solar cell using zno electron injection layer with pdms as antireflective coating
Recently, perovskite solar cells (PSCs) exhibits tremendous power conversion efficiency and has shown enhanced figures of merit being secured regarding cell stability. In this paper, perovskite solar cell with Zno electron injection layer is presented. The humidity degradation of the perovskite active layer and the efficiency of the cell is observed under several conditions. Using ZnO as a planner

Cold flow numerical simulation inside local pottery furnace for different designs for the air inlet
One of the many pleasures of living in Egypt is having the opportunity to visit places like a village called Tunis in El-Fayoum governorate which is a touristic village and export art and handicraft such as Pottery for 3-4 decades. The clay processing in the traditional pottery industry contains several stages. The process and quality of the pottery have to be improved to reduce pollution and the
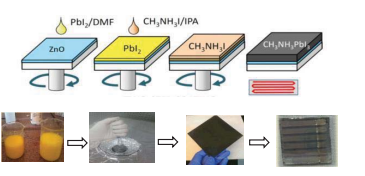
Interfacial modification of perovskite solar cell using zno electron injection layer with pdms as antireflective coating
Recently, perovskite solar cells (PSCs) exhibits tremendous power conversion efficiency and has shown enhanced figures of merit being secured regarding cell stability. In this paper, perovskite solar cell with Zno electron injection layer is presented. The humidity degradation of the perovskite active layer and the efficiency of the cell is observed under several conditions. Using ZnO as a planner
Healthcare
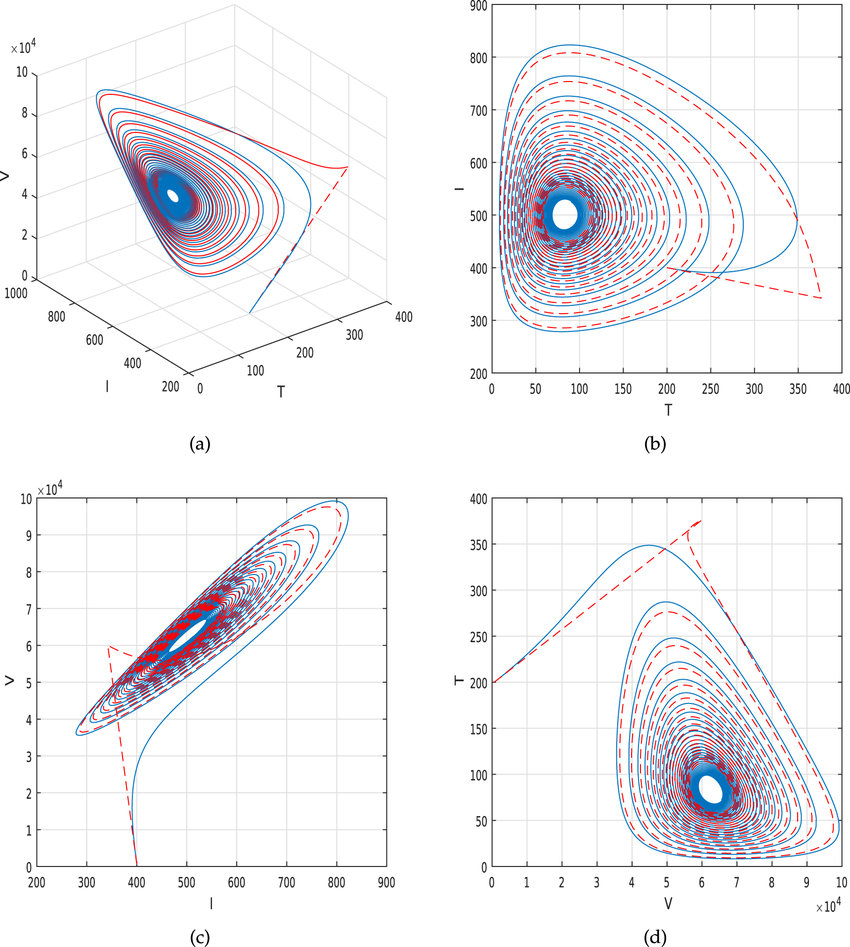
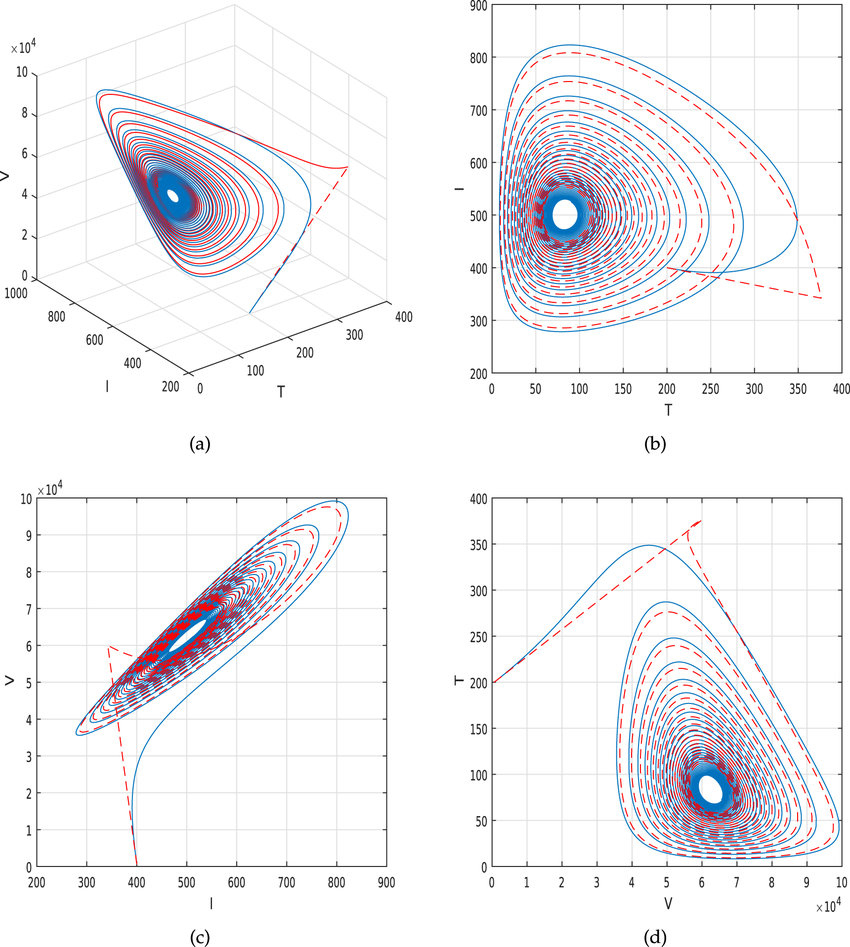
Fractional-Order Models for HIV Viral and Epidemiological Dynamics
Since 1981, millions have died of HIV with no available cure until now. Therefore, researchers have always tried to study its dynamics through mathematical modeling to make it more predictable and controllable. In this chapter, the authors are concerned with two different models: the viral and epidemiological dynamics of HIV. Commonly, researchers introduce HIV dynamics using ordinary differential
Fractional-Order Model for the AIDS Epidemiological Dynamics
Modeling epidemiological dynamics of AIDS infection is an indispensable method to track the spread of such fatal disease. In this paper, the Differential Infectivity and Staged Progression Model, DISP, is modified to include the possibility of recovery, hence the new proposed model is called the DISPR model. The DISPR model is also generalized to the fractional order domain to allow more
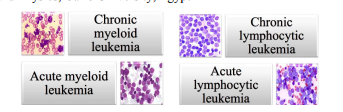
Fractional-order mathematical model for Chronic Myeloid Leukaemia
This paper is dedicated to develop a fractional order model of the rate of change of cancerous blood cells in Chronic Myeloid Leukaemia using fractional-order differential equations as well as tackling the factors that affect this rate and compare between them. The simulated cases (using MATLAB) prove that the proposed model is doable in terms of the variables positions in the equations and its